PID regelaars worden het meest ingezet in procesregelingen. Als slimme 3-in-1-regelaars bewijzen ze zich elke dag in tal van industriële systemen. Ze regelen nauwkeurig het verschil uit tussen gemeten en ingesteld waarde. Lees hier meer over de feiten en cijfers van de PID-regeling.
Een digitale PID regelaar kan door de geïntegreerde microprocessor worden geprogrammeerd en geparametreerd. De regelaar werkt proportioneel, integrerend en differentiërend (PID), waarbij de intensiteit van de afzonderlijke parameters wordt aangepast aan het te sturen systeem. Dit wordt gedaan door juiste dimensionering van de regelparameters.
Het principe van een PID regelaar is relatief eenvoudig uit te leggen. Of het nu gaat om een PID temperatuurregelaar of PID vochtigheidsregelaar – de regelaar probeert altijd de regelafwijking tussen de gemeten waarde en de ingestelde waarde uit te regelen. De P-actie versterkt de regelafwijking, de I-actie verhoogt het uitgangssignaal zolang er een regelafwijking is en de D-actie gaat een verandering van de gemeten waarde tegen. Als niet alle acties nodig zijn voor de regeling, kunnen ze worden gedeactiveerd. Afhankelijk van de toepassing krijg je dan een P-regelaar, PI-regelaar, PD-regelaar of I-regelaar.
De PID structuur heeft het beste regelgedrag voor de meeste toepassingen. PID compact regelaars zijn zeer gangbaar op het gebied van temperatuurregeling, ook kunnen weerstandsthermometers en thermokoppels direct worden aangesloten. Sommige regelprocessen vereisen niet alle regel acties, zoals rotatiesnelheid (PI), flow(I), niveau en positionering (P of PD).
De P-actie reageert zeer snel en versterkt de regelafwijking, nadeel er ontstaat een permanente regelafwijking. De verantwoordelijke regelparameter is de P-actie (Xp proportionele band). Als de P-actie kleiner wordt, wordt de regelaar sneller en de regelafwijking kleiner. Het systeem neigt echter meer en meer te oscilleren.
De I-actie elimineert de regelafwijking. Als de I-actie (Tn integratie tijd) kleiner wordt ingesteld, bouwt de regelaar sneller zijn uitgangsniveau op en gaat de regelafwijking sneller tegen. Als de instelling echter te klein is, treedt er een oscillerend gedrag op.
De D-actie (Tv differentiatie tijd) gaat de verandering van de gemeten waarde tegen. Voor een verwarm regelaar betekent dit dat het uitgangsniveau wordt verlaagd wanneer de gemeten waarde stijgt en wordt verhoogd wanneer de gemeten waarde daalt. Het beschreven gedrag heeft een dempend effect. De verantwoordelijke parameter is de D-actie. Hoe groter D-actie is ingesteld, hoe groter het beschreven effect.
Het gedrag van het te besturen systeem is altijd afhankelijk van het werkpunt (ingestelde waarde definitie in het regelproces). Voor optimalisatie van het systeem, kies je je werkpunt waarvoor de optimale regelparameters worden verwacht. Zo wordt voorafgaand aan optimalisatie een oven geladen, terwijl voor een doorloopoven een afname moet worden gegenereerd. Als tijdens de optimalisatie een werkpunt is opgegeven, liggen de regelparameters vast voor dit werkgebied.
Als er vergelijkbare systemen/regelcircuits bestaan, kunnen we de hiervoor gebruikte regelparameters als test toepassen. Als deze aanpak niet tot het juiste regel gedrag leidt, kan een van de volgende optimalisatiemethoden worden toegepast.
Oscillatie methoden volgens Ziegler en Nichols
Deze methode wordt gebruikt voor relatief snel gestuurde systemen. Ter voorbereiding wordt er een grote P-actie (XP >) ingesteld. Een ingestelde waarde (w) binnen het werkbereik wordt in het onderstaande afbeelding getoond.
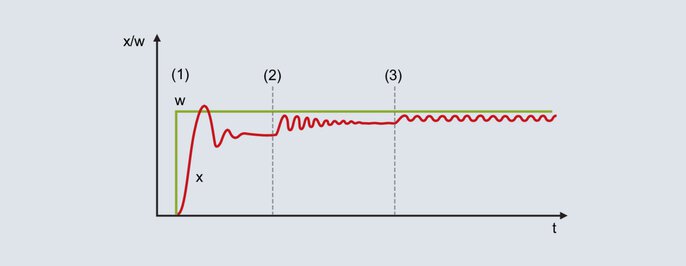
Afb.52: Verloop van de gewenste waarde en werkelijke waarde bij gebruik van de oscillatiemethode
Met een relatief grote P-actie, loopt de gemeten waarde (x) zonder te veel te oscilleren naar zijn eind waarde. [afb. 52 (1)]. Doordat er geen I-actie is, is er een blijvende regelafwijking.
De P-actie wordt verlaagd (afb. 52 [2]): de gemeten waarde stijgt en loopt naar de eindwaarde met een grotere neiging tot oscilleren. De P-actie kan meerdere keren worden verminderd totdat de gemeten waarde continu oscilleert (afb. 52 [3]). Het proportionele band gebied die nodig is voor dit gedrag wordt Xpk, Pbc (critical Xp, Pb) genoemd en moet zo nauwkeurig mogelijk worden bepaald (verlaag P-actie niet in te grote stappen).
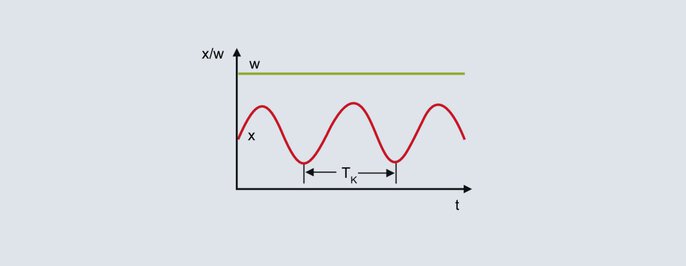
Kritieke periode lengte
De tweede parameter voor het proces wordt bepaald uit de continue oscillatie van de gemeten waarde in de bovenstaande afbeelding TK. De TK (in seconden) is het resultaat van het tijdsinterval tussen 2 minimale waarden. Xpk (Pbc) en TK worden in de volgende tabel vervangen door de gewenste regelaar structuur:
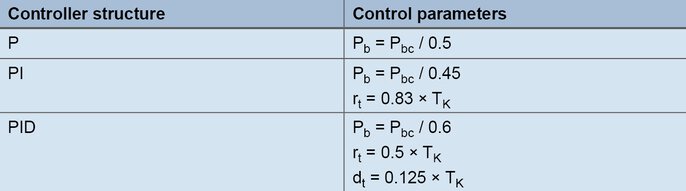
Formules voor aanpassing volgens de oscillatiemethode
Methode stap-respons volgens Chien, Hrones en Reswic
Met deze methode worden de regelparameters, zelfs bij trage regelsystemen, relatief tijdbesparend bepaald. De methode wordt gebruikt voor systemen van de 2e orde en biedt de bijzonderheid om onderscheid te maken tussen de formules voor het volg en verstoor gedrag. Als vuistregel worden de overdrachtsfunctie (Ks) van het te regelen systeem, de vertragingstijd (Tu) en de reactietijd (Tg) bepaald uit de stap-respons.
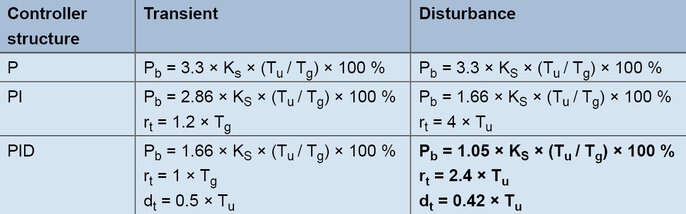
Formules die moeten worden gemaakt na de stap respons
Voorbeeld:
Voor een laboratoriumoven wordt een PID regelaar ingezet. Het doel is een optimaal regel gedrag, ingestelde waarde ligt in het werk gebied van 200 °C. In hand modus wordt het uitgangssignaal stapsgewijs verhoogd totdat de gemeten waarde iets onder de gewenste waarde ligt. Bij een uitgangssignaal van 60% wordt bijvoorbeeld een temperatuur van 180 °C bereikt. Vanaf 60% wordt het uitgangssignaal stapsgewijs verhoogd tot 80% en wordt de gemeten waarde geregistreerd.
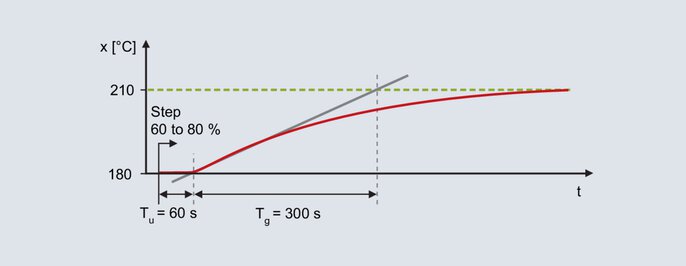
Staprespons van de laboratoriumoven
Via de Stap-respons functie wordt de Tu (vertragingstijd) bepaald 60s en de Tg (reactietijd) 300s . De overdrachtsfunctie (Ks) van de regelaar is het gevolg van de gemeten waarde (x) verandering gedeeld door de uitgangsverandering (y).

Vergelijking 22
Gebruikmakend van de vuistregels, resulteren de volgende parameters afgeleid worden:

Vergelijking 23

Vergelijking 24

Vergelijking 25
De uitgangssprong moet worden uitgevoerd in het werkgebied. De sprong groten moet zo gekozen worden dat de gemeten waarde geëvalueerd kan worden. Na de uitgangssprong wordt er gewacht op de eindwaarde van de gemeten waarde. Een tijdbesparend alternatief is de methode gebaseerd op de stijgsnelheid.
Procedure volgens de stijgingssnelheid
Met betrekking tot de sprong voorgave vind de procedure op dezelfde wijze plaats als voor de stap-respons procedure. Vóór de sprong wordt een uitgangswaarde voorgegeven waarbij de gemeten waarde iets onder de latere gebruikte ingestelde waarde ligt.
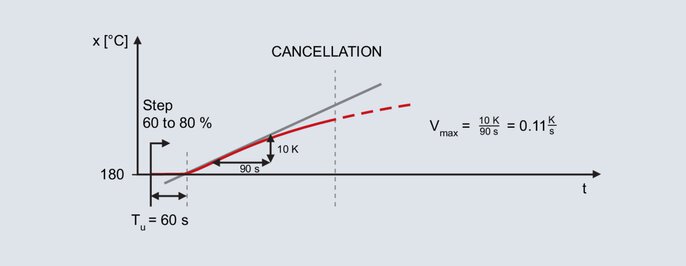
Werkelijke waardeverloop bij voortzetting volgens stijgingspercentage
De sprongspecificatie is weer voor de laboratoriumoven; het daaropvolgende werkgebied is eveneens 200 °C. Door in de hand modus een uitgangssignaal van 60% in te stellen, wordt de gemeten waarde 180 °C. Het uitgangsniveau wordt geleidelijk verhoogd tot 80%.
Nadat de sprong is ingezet neemt de gemeten waarde toe. Er wordt geregistreerd totdat de gemeten waarde de maximale steilheid heeft. Ook bij deze methode wordt de raaklijn ingetekend en de Tu (vertragingstijd) bepaald. De tweede parameter is de maximale toenamesnelheid, die overeenkomt met de helling van de raaklijn. De maximale toenamesnelheid wordt bepaald door de temperatuurstijging per tijdseenheid.

Vergelijking 26
De vastgestelde waarden Vmax (0,11 K/s) en Tu (60 s) worden gebruikt in de volgende formules:
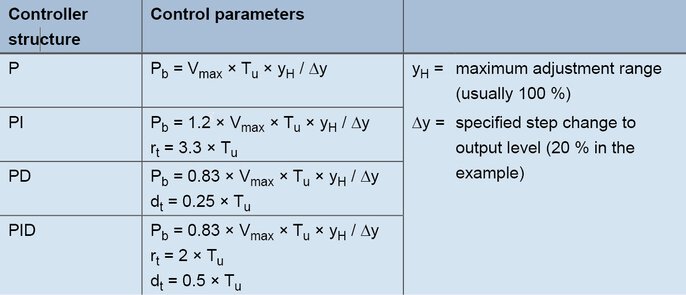
Formules voor aanpassing aan de stijgingsgraad
Voor een PID regelaar worden de waarden verkregen met de volgende formules:

Vergelijking 27

Vergelijking 28

Vergelijking 29
Empirische methode voor het bepalen van de regelparameters
Met deze methode worden gunstige instellingen voor de componenten P, D en I na elkaar bepaald. Uitgaande van de oorspronkelijke toestand (uitgangsniveau 0 %) specifieer je de ingestelde waarde. De procedure is alleen van toepassing op relatief snel geregelde systemen zoals temperatuurgeregelde systemen toerental of debiet.
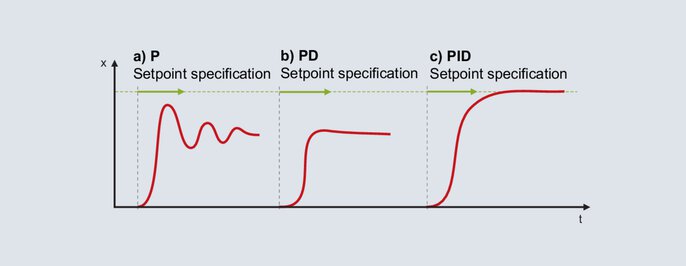
Instellen van een PID regelaar volgens de empirische methode
Voor de regelaar wordt een P-actie geactiveerd. De proportionele band wordt relatief groot ingesteld (de dimensionering hangt af van het te regelen systeem) en de ingestelde waarde wordt in het werkgebied gespecificeerd. De gemeten waarde zal traag naar de eindwaarde toegaan en een relatief grote regelafwijking zal het gevolg zijn. Vervolgens wordt de ingestelde waarde gespecificeerd met een steeds kleiner wordend proportioneel band P-actie. Het doel is een P-actie waarbij de gemeten waarde na twee tot drie volledige oscillaties zijn stabiele eindwaarde bereikt (afb. 56a). Voor een gedempte start wordt de structuur overgeschakeld van P op PD. Beginnend met een kleine instelling van de D-actie, specificeer je ingestelde waarde met een toenemende D-actie. Indien de gemeten waarde haar eindwaarde bereikt met de kleinst mogelijke oscillatie, is er sprake van een gunstige D-actie (afb. 56b).
Opmerking: Zodra de regelaar tijdens het opstarten het uitgangsniveau ook maar één keer op 0 % zet, is de D-actie te hoog ingesteld.
Het overschakelen naar de PID-structuur activeert de I-actie. De Integratie tijd Tn wordt gewoonlijk gesteld met viermaal de waarde van de eerder bepaalde Tv. afb. 56c toont het gedrag bij een instelling van Tn = 4 × Tv , I-actie = 4 x D-actie.
Voor sommige regel systemen kunnen niet alle (PID) acties worden geactiveerd. Indien een P-actie bij grote instellingen een onbestendig gedrag vertoont, kan noch de P- noch de D-actie worden gebruikt. De I-actie kan dan toegepast worden.
Indien de optimalisatie van de P-actie succesvol was, maar de invoering van de D-actie de regelkring onstabiel maakt, wordt de PI-actie gebruikt.
De toepassing van de gepresenteerde optimalisatiemethoden zal zeer waarschijnlijk een stabiel maar niet optimaal regelgedrag opleveren. Het regelresultaat wordt verder verbeterd door handmatige na-optimalisatie. Als het gedrag van een PID-regelaar kan worden toegewezen aan een van de curven 62b tot 62e, vindt u hieronder tips voor verdere optimalisatie.
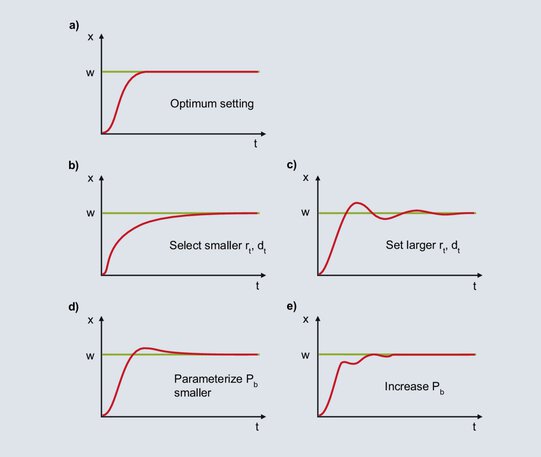
Afb.62: Aanwijzingen voor de fijne afstelling van een PID regelaar
Het diagram toont het optimale gedrag voor een PID regelaar.
Na het specificeren van de ingestelde waarde stijgt de gemeten waarde maximaal tot het bereiken van het proportionele band gebied. Als de gemeten waarde in het proportionele band gebied komt, wordt het uitgangsniveau door de P-actie verlaagd en zorgt de I-actie voor het uitregelen op de ingestelde waarde. Het vergroten van de I-actie verzorgt een traag uitregel gedrag. Voor snel uitregel gedrag moet I-actie verlaagt worden evenals D-actie volgens de verhouding Tv/Tn = ¼.
Wanneer de gemeten waarde het proportionele band gebied binnenkomt, verhoogt de I-actie het uitgangsniveau. De verhoging gaat door totdat de gemeten waarde de ingestelde waarde bereikt. In het getoonde geval bouwt de I-actie te veel uitgangsniveau op zodat de regelafwijking niet uitgeregeld wordt en de gemeten waarde de ingestelde waarde overschrijdt. Bij een negatieve regelafwijking wordt het uitgangsniveau te snel verlaagd, de gemeten waarde daalt tot onder de ingestelde waarde, enz. De symmetrische schommeling van de gemeten waarde rond de ingestelde waarde geeft aan dat I-actie te laag is ingesteld. De I-actie moet worden verhoogd evenals D-actie volgens de verhouding Tv / Tn = 1/4.
De I-actie wordt actief vanaf het moment dat de gemeten waarde in het proportionele band gebied komt en de regelafwijking wil uitregelen. Door een te hoog P-actie begint de I-actie bij een te grote regelafwijking al het uitgangsniveau op te bouwen. Wanneer de regelafwijking wordt geëlimineerd, is de I-actie te groot en overschrijdt de gemeten waarde de ingestelde waarde. Bij een kleinere instelling van de P-actie begint de I-actie zijn uitgangsniveau later op te bouwen met als gevolg een kleinere regelafwijking. De getoonde eenmalige overshoot wordt minder waarschijnlijk.
Als de P-actie te laag is ingesteld, wordt het uitgangsniveau door de P-actie kort voordat de ingestelde waarde wordt bereikt verlaagd. Wanneer de gemeten waarde het proportionele band gebied binnenkomt, wordt het uitgangsniveau verminderd en daalt de gemeten waarde. Door daling van gemeten waarde neemt de regelafwijking toe waardoor het uitgangsniveau toe neemt. In het proportionele band gebied leiden kleine veranderingen in de gemeten waarde tot grote veranderingen in het uitgangsniveau, wat resulteert in een hoge neiging tot oscilleren. Kalmeren van de regelkring wordt bereikt door het proportionele band te vergroten.


